![]() — О LabVIEW — Решения — Разработка мобильного робота на базе ROS и устройств CompactRIO для использования в опасных условиях
— О LabVIEW — Решения — Разработка мобильного робота на базе ROS и устройств CompactRIO для использования в опасных условиях
Курсы LabVIEW в Новосибирске!

Объявляется набор на курсы
"Система графического программирования LabVIEW"
Разработка мобильного робота на базе ROS и устройств CompactRIO для использования в опасных условиях
Группа Интеллектуальных Систем занимается исследованиями в области проектирования мехатронных устройств, в частности использования виртуальных технологий и моделирования, необходимых для создания промышленных роботов. Группа участвует в важных международных исследовательских проектах и активно сотрудничает с партнерами в промышленности. У нас давняя традиция привлечения студентов к созданию решений в новых передовых промышленных областях.
Эти новые области открывают горизонты для открытий и испытаний инновационных методов и систем, хотя конечные пользователи пока еще не применяют существующие. Примерами подобных приложений являются тренажеры для автомобильных гонок и верховой езды, осуществляющие естественную обратную связь по параметрам движений. Такие мехатронные системы позволяют разрабатывать инновационные методы, которые можно применить в более сложных промышленных приложениях.
| Мехатронные тренажеры, разработанные студентами |
 |
В 2011 землетрясение в Тихом океане недалеко от берегов Японии вызвало цунами разрушающей мощности, которое повлекло за собой крупномасштабную катастрофу на Фукусимской атомной электростанции. Цунами отключило резервное питание систем охлаждения реактора, что привело к расплавлению активной зоны ядерного реактора, взрывам химикатов и выбросу радиоактивного вещества.
| Фукусимская атомная электростанция после цунами |
| |
Подвиг пятидесяти фукусимцев вдохновил нашу команду, как и многих людей в мире. Мы восхищаемся их храбростью, но чувствуем, что современные мехатронные системы могут устранить необходимость участия людей в выполнении неквалифицированных ремонтных работ в таких опасных условиях. Эти обстоятельства и вдохновили нас на создание мобильного робота.
| Концептуальная модель робота TIERA |
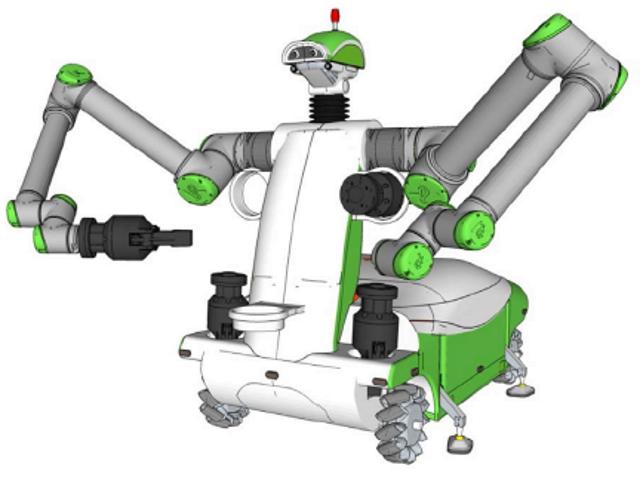 |
- Безвентиляторный встроенный компьютер, управляющий большей частью оборудования робота
- Робототехнические манипуляторы и инструменты, реализующие различные виды ремонтных работ
- Система машинного зрения, позволяющая оператору получать сигнал визуальной обратной связи с камер робота
- Датчики для получения информации об окружающей среде
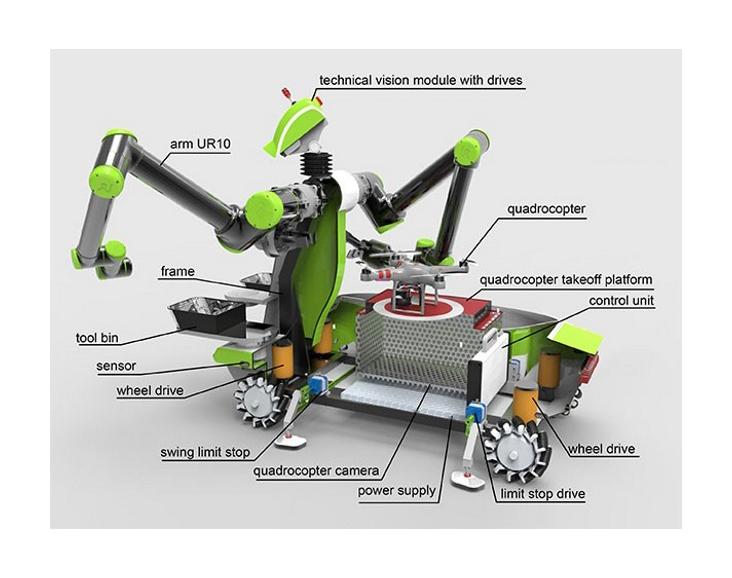
| Схема робототехнической системы |
 |
| Подсистема передвижения | Сенсорная подсистема | Подсистема управления и программное обеспечение |
| Система передвижения высокой проходимости (четыре независимых коробки передач серводвигателей) | Стереоскопические камеры, установленные на голове, возможность трехмерной потоковой передачи и распознавания образов | Централизованная система управления CompactRIO |
| Два манипулятора с механизмами захвата | Камеры, интегрированные в каждый манипулятор | Обмен данными по WiFi и 4G |
| Инструменты ремонта и сборки, включая электрические отвертку, дрель, режущий инструмент и паяльник | Световая локация (лидар) и 10 ультразвуковых датчиков расстояния | Интеллектуальная система питания |
| Подвижные голова и шея с возможностями панорамирования и наклона | Одна 360 камера, совместимая с визуализацией в очках виртуальной реальности | Новое методология - LabVIEW и ROS |
| Джостик с обратной связью по усилию | Инерциальная навигационная система | |
| Система согласования с летающим роботом | Квадрокоптер для обзора местности (скрыт внутри робота) |
| cRIO-9035: основной контроллер TIERA |
 |
Обмен данными между компонентами системы осуществляется с помощью встроенных драйверов и API, так что мы смогли сконцентрировать наши силы на разработке робота. Это значит, что мы потратили меньше времени на решение проблем сбора данных, а больше времени уделили анализу системы и увеличению надежности наиболее важных компонентов робота.
Более того, расширяемая архитектура LabVIEW, использованная нашей командой разработчиков гарантирует, что система может быть легко усовершенствована и переконфигурирована программным способом даже после развертывания.
| Схема интеграции CompactRIO с датчиками, актюаторами и ROS системой |
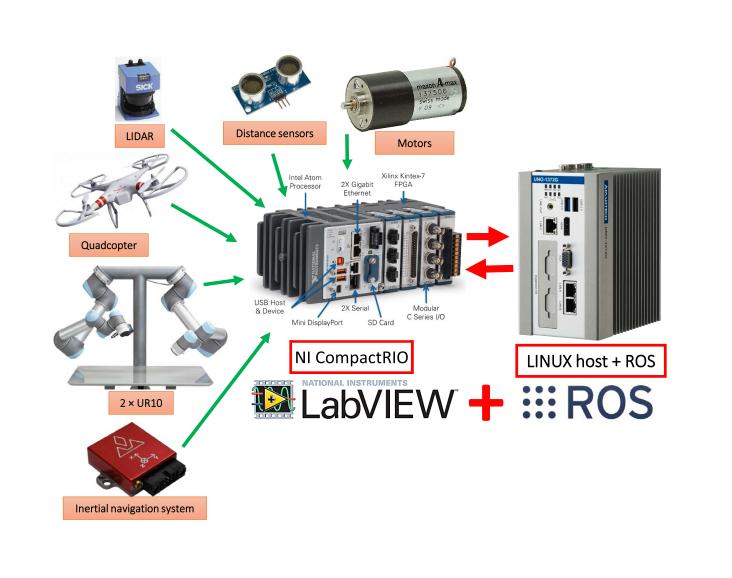 |
По локальной сети можно передавать управляющие сообщения, публикуемые ROS главной станции, для перемещения звеньев робота. Бортовой компьютер подписывается и считывает эти сообщения. От компьютера, встроенного в робот, сигнал поступает в каждое устройство в соответствии с командами. Сигналы дистанционного управления поступают в главную станцию, обрабатываются ROS и отправляется на модуль Advantech по WiFi.
Мы рассчитываем прямую и обратную задачи кинематики в ROS на главной станции, а обобщенные координаты передаем контроллеру для управления механизмами. Как было описано ранее, подсистемы робота функционируют под управлением ROS, некоторые подсистемы мы запрограммировали в LabVIEW. Мы можем объединить код каждой из частей в одну программу управления, которая контролирует каждое из устройств робота и управляет ими. Мы расположили контроллеры этих устройств в одной локальной сети, что позволило осуществить обмен данными между ними.
Мы можем интегрировать контроллер CompactRIO в робототехническую систему, используя библиотеки LabVIEW для публикации информации по протоколам ROS в одной локальной сети. Университет Тафтса разработал эту библиотеку, и она находится в открытом доступе на LabVIEW Tools Network (http://sine.ni.com/nips/cds/view/p/lang/ru/nid/213279). Приложения LabVIEW выполняются в CompactRIO и на главной станции одновременно.
Интерфейс пользователя отображает информацию от датчиков и позволяет использовать информацию после публикации в сети другими подсистемами робота. Например, вращение колеса должны прекратиться, если расстояние до препятствия меньше допустимого значения. Совместная работа ROS и LabVIEW дает нам возможность использовать различные устройства и контроллеры, подключенные к одной сети. Наша задача - организовать из устройств локальной сети единую систему, состоящую из различных технических средств и программного обеспечения.
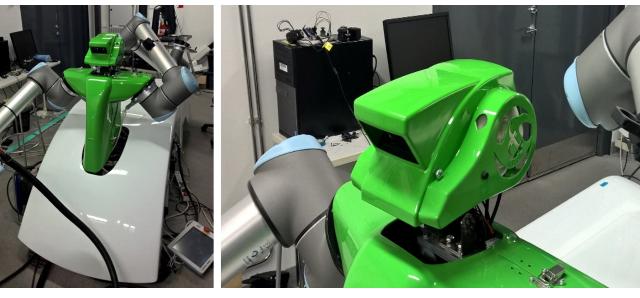
| Быстрый прогресс робота TIERA |
 |
- Больницы: доставка лекарственных средств, транспортировка еды и медикаментов
- Уборка: автоматическая уборка больших площадей, таких как супермаркеты, аэропорты, промышленные зоны
- Склады, распределение и логистика: эффективное перемещение объектов со складских полок в зоны выполнения заказов
- Промышленность: сборочные работы, доставка материалов
- Военное дело и безопасность: ликвидация последствий взрыва, наблюдение и мониторинг опасных зон
- Добыча полезных ископаемых: открытие новых залежей полезных ископаемых, разведка в опасных зонах
- Судостроение: сварка и резка
- Исследования: исследование вулканов, Антарктиды и Арктики